


Project Overview
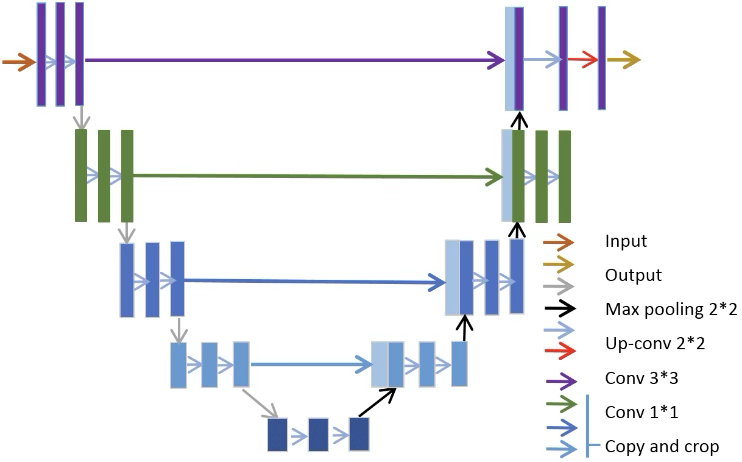
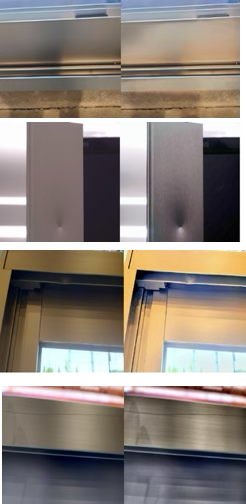
Agricultural water infrastructure faces mounting challenges from aging canal systems, climate-induced stress, and the critical need for water conservation, while traditional manual inspection methods are dangerous, time-consuming, and inadequate for comprehensive monitoring. In partnership with Toprise, we have developed an innovative vision-guided UAV system specifically designed to operate in GPS-denied environments where narrow canals and bridge structures block satellite signals. Our core technical innovation combines visual SLAM (simultaneous localization and mapping) with advanced computer vision algorithms for crack detection and sizing, enabling autonomous navigation through constrained corridors while maintaining safe distances from canal walls. The system integrates machine learning-based pattern recognition, real-time image processing, and adaptive flight control to overcome the fundamental challenge of autonomous operation in linear, confined spaces where GPS navigation fails.
The technology provides immediate applications for agricultural water management agencies, irrigation districts, and infrastructure maintenance companies seeking cost-effective, comprehensive canal monitoring solutions. Beyond primary irrigation channels, the system extends to drainage systems, reservoirs, weirs, and related water structures, offering early detection capabilities that prevent catastrophic failures and optimize maintenance scheduling. The research impact includes advancing autonomous navigation in constrained environments, establishing new standards for infrastructure monitoring, and promoting water security through proactive infrastructure management. Our team combines expertise in computer vision, autonomous systems, and agricultural engineering, actively seeking partnerships with agricultural organizations, water management agencies, and technology companies interested in deploying next-generation infrastructure monitoring solutions that enhance water security and support sustainable agricultural practices.