

Project Overview
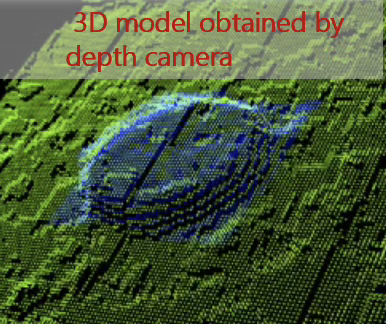
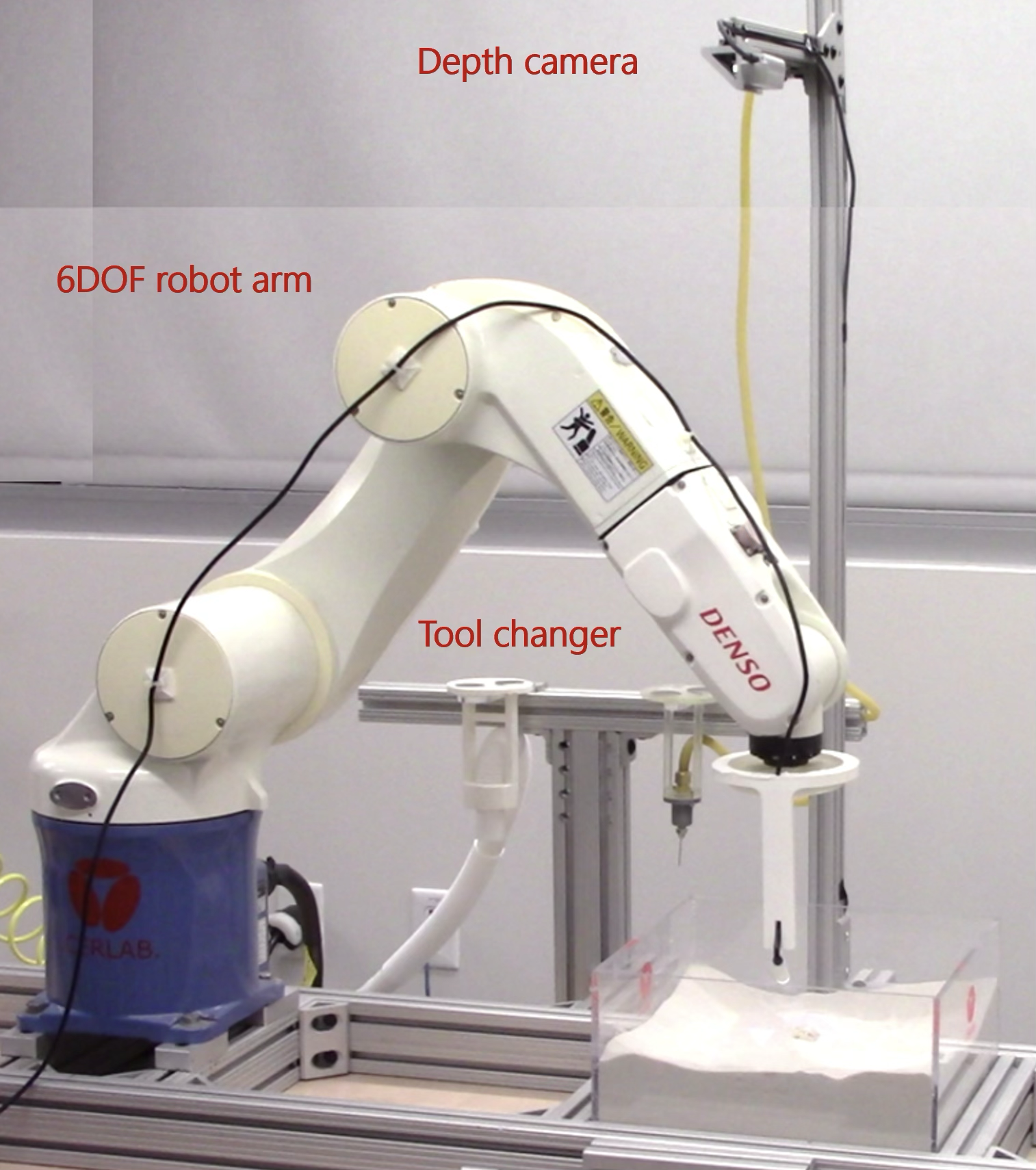
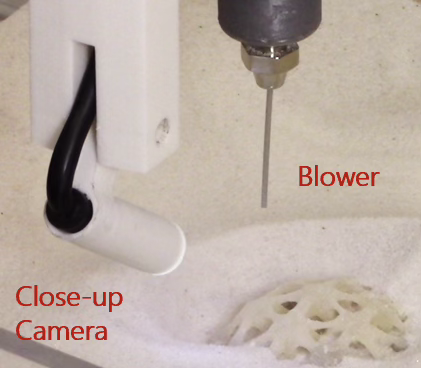
Additive manufacturing post-processing presents significant challenges in powder removal, where manual cleaning exposes operators to potentially hazardous materials while requiring precise attention to complex geometries that can be damaged by aggressive cleaning methods. We develop automated robotic de-powdering systems that combine industrial robotic arms with custom end-effectors and depth-aware computer vision to safely and efficiently remove residual powder from additively manufactured parts. Our approach integrates intelligent tool path planning that navigates around delicate features, real-time vision monitoring to track removal progress, and controlled environmental systems that manage airflow and powder collection. The technical innovation lies in developing perception algorithms that can distinguish between removable powder and part features while planning tool motions that achieve thorough cleaning without damaging fine structures or internal channels.
This research transforms additive manufacturing workflows by addressing one of the most labor-intensive and potentially hazardous post-processing steps, enabling safer, faster, and more consistent results across both metal and polymer printing processes. Our robotic de-powdering cell reduces operator exposure to fine particulates and chemical residues while standardizing cleaning quality that minimizes rework and part rejection rates. The system integrates seamlessly with existing AM workflows and part tracking systems, supporting compliance requirements and quality documentation that are essential for aerospace, medical, and automotive applications. Professor Kenji Shimada and researcher Abdulhamid Mathkur lead this development, collaborating with additive manufacturing companies to deploy automation solutions that enhance both worker safety and production efficiency in the rapidly growing 3D printing industry.