

Project Overview
Complex real-world tasks such as large-scale exploration, coordinated inspection, and heavy payload transport exceed the capabilities of individual robots, necessitating sophisticated multi-robot coordination systems that can handle dynamic environments and unpredictable failures. Our research addresses the fundamental challenges of distributed task allocation, robust communication under bandwidth constraints, and adaptive coordination policies that enable robot teams to accomplish missions that would be impossible for individual agents. The core technical innovation lies in developing scalable algorithms that combine distributed planning architectures with fault-tolerant communication protocols, allowing teams to dynamically reallocate responsibilities when robots fail or environmental conditions change. This approach tackles critical problems in swarm robotics including consensus achievement under communication delays, load balancing in heterogeneous teams, and maintaining mission effectiveness despite partial system failures.
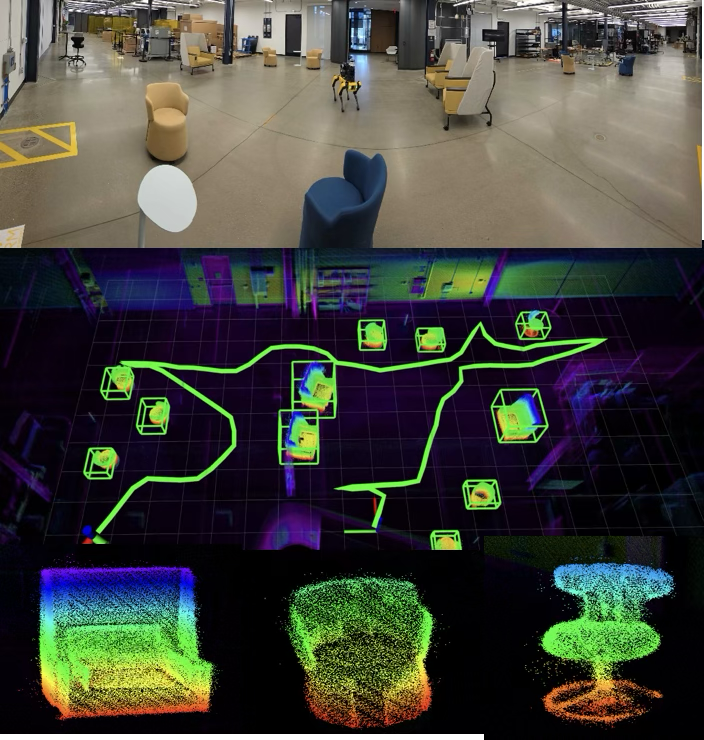
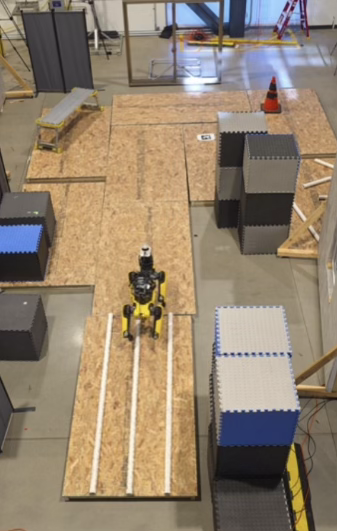
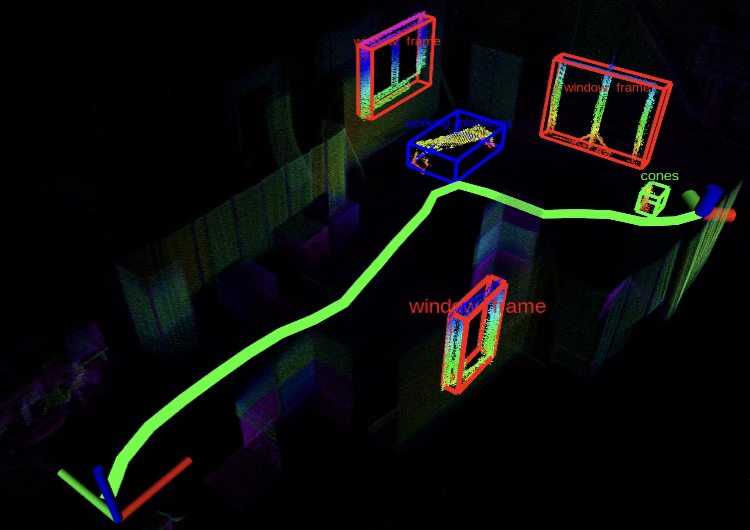
The technology offers immediate applications in industrial automation, search and rescue operations, environmental monitoring, and infrastructure inspection where coordinated multi-robot systems provide significant advantages over sequential execution by individual robots. Our fielded demonstrations in multi-robot exploration and mapping, shared payload transport, and coordinated inspection showcase measurable performance gains and system reliability improvements that directly translate to operational benefits. The research impact extends to advancing distributed systems theory, establishing new standards for swarm robotics applications, and enabling autonomous operations at scales previously unachievable. Our team combines expertise in distributed systems, robotics, and swarm intelligence, seeking partnerships with industrial automation companies, defense organizations, and research institutions interested in deploying scalable multi-robot coordination systems for complex real-world applications.