Project Overview
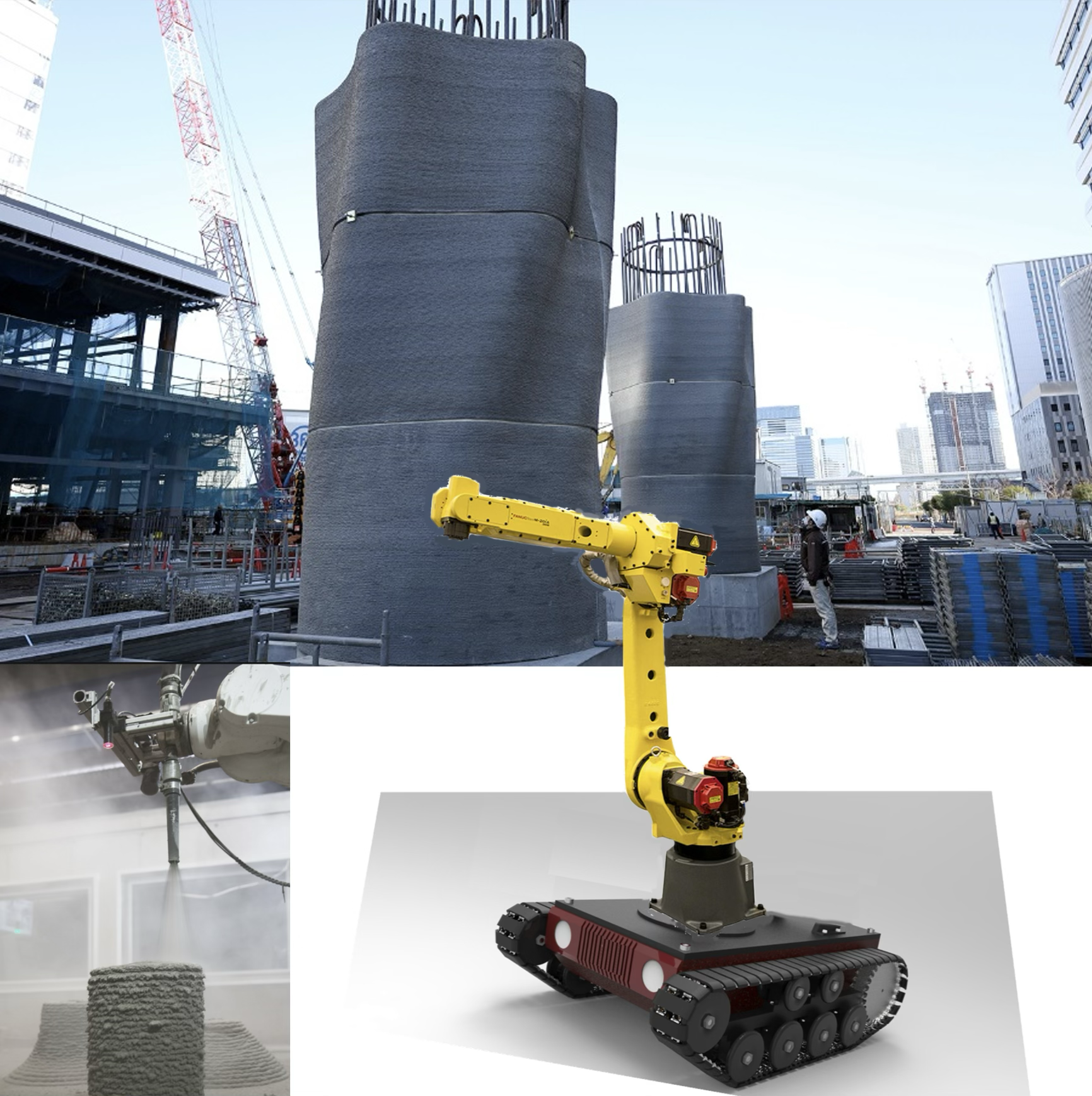
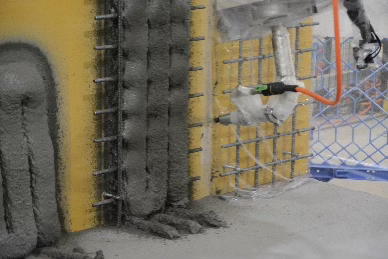
Real-world robotic applications require the ability to both navigate complex environments and perform precise manipulation tasks, yet most current systems excel at only one of these capabilities. Our autonomous mobile manipulator platform addresses this challenge by integrating a mobile base with a 7-degree-of-freedom robotic arm into a unified system capable of end-to-end task execution in dynamic environments. The core innovation combines simultaneous localization and mapping (SLAM) with semantic perception, advanced grasp planning algorithms, and compliant control systems to enable the robot to navigate cluttered spaces while executing complex manipulation sequences. Key technical challenges include developing robust object recognition and pose estimation in varying lighting conditions, implementing safe human-robot interaction protocols, creating adaptive grasp strategies for unknown objects, and ensuring reliable operation across different surface types and workspace configurations.
This integrated mobile manipulation platform enables transformative applications across manufacturing, logistics, healthcare, and service industries by providing autonomous systems capable of performing complete workflows rather than isolated tasks. In manufacturing environments, the system can autonomously retrieve parts, perform assembly operations, and conduct quality inspections while adapting to changing production layouts. Healthcare facilities benefit from autonomous material transport, medication delivery, and assistive care tasks that reduce staff workload and improve patient safety. The technology offers significant productivity improvements through 24/7 operation capabilities, consistent task execution, and the ability to work safely alongside human operators. Research applications include advancing multi-modal perception systems, developing robust motion planning algorithms, and creating adaptive learning frameworks for complex manipulation tasks. Our research team brings together expertise in robotics, computer vision, and artificial intelligence to advance autonomous manipulation capabilities. We actively seek partnerships with industry leaders, healthcare organizations, and research institutions interested in deploying next-generation mobile manipulation systems that can revolutionize automated workflows in real-world environments.