


Project Overview
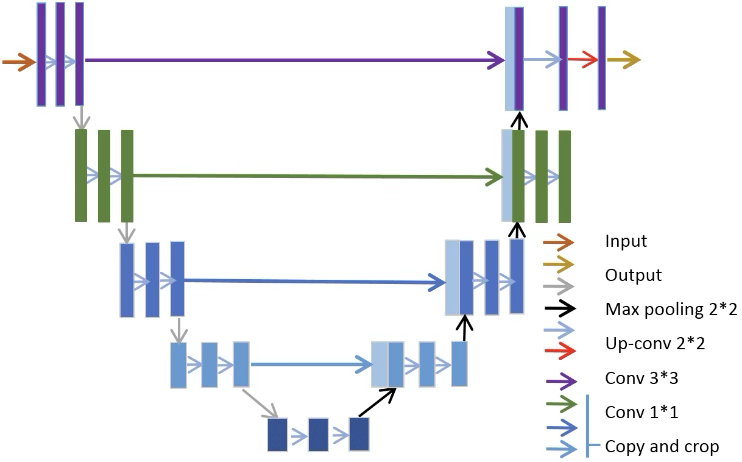
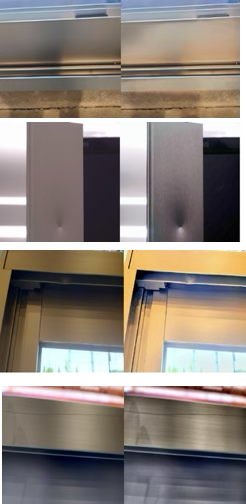
Construction quality control faces the critical challenge of ensuring consistent window frame installation standards while minimizing disruption to active job sites. Our legged robot inspection system addresses this need by deploying advanced machine learning and computer vision technologies through a mobile platform equipped with a pan-tilt-zoom camera. The core innovation lies in combining autonomous navigation using SLAM (Simultaneous Localization and Mapping) with deep learning-based defect detection algorithms that can identify scratches, dents, installation misalignments, and surface imperfections in real-time. The primary technical challenge involves developing robust vision models that maintain accuracy across varying lighting conditions, construction environments, and window frame materials while ensuring the robot can safely navigate complex job sites.
This automated inspection system delivers significant value to construction companies through reduced manual inspection time, enhanced quality consistency, and objective documentation that supports building code compliance. The technology enables real-time quality monitoring during construction phases, helping contractors identify and address issues before project completion, thereby reducing costly rework and warranty claims. Window manufacturers benefit from improved installation quality data and reduced callback rates, while construction crews gain access to detailed inspection reports that streamline quality assurance workflows. Our research team combines expertise in robotics, computer vision, and construction technology to advance autonomous inspection capabilities. We are actively seeking industry partnerships with construction companies and window manufacturers, as well as collaboration opportunities with researchers interested in applying machine learning to construction automation and quality control systems.