

Project Overview
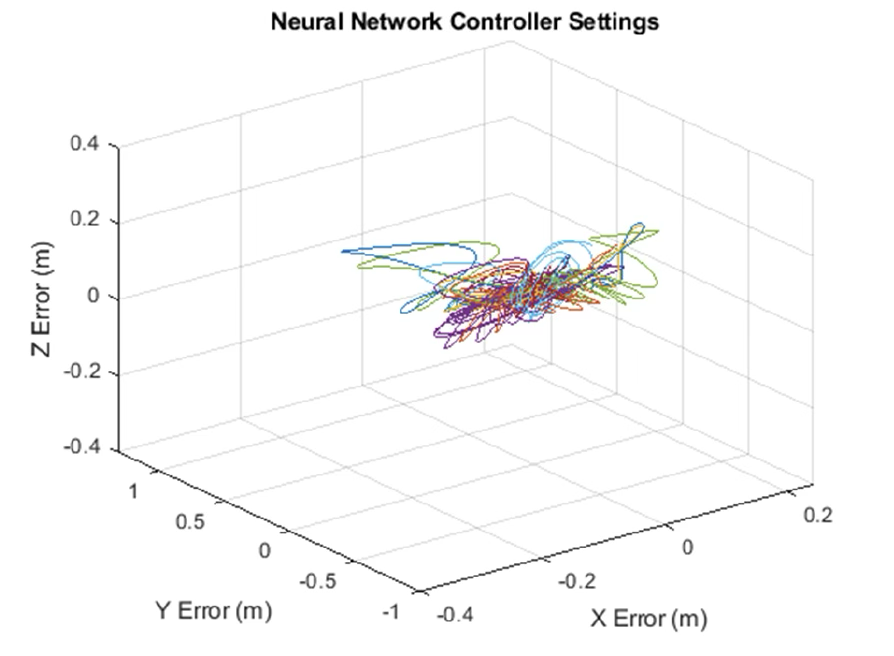
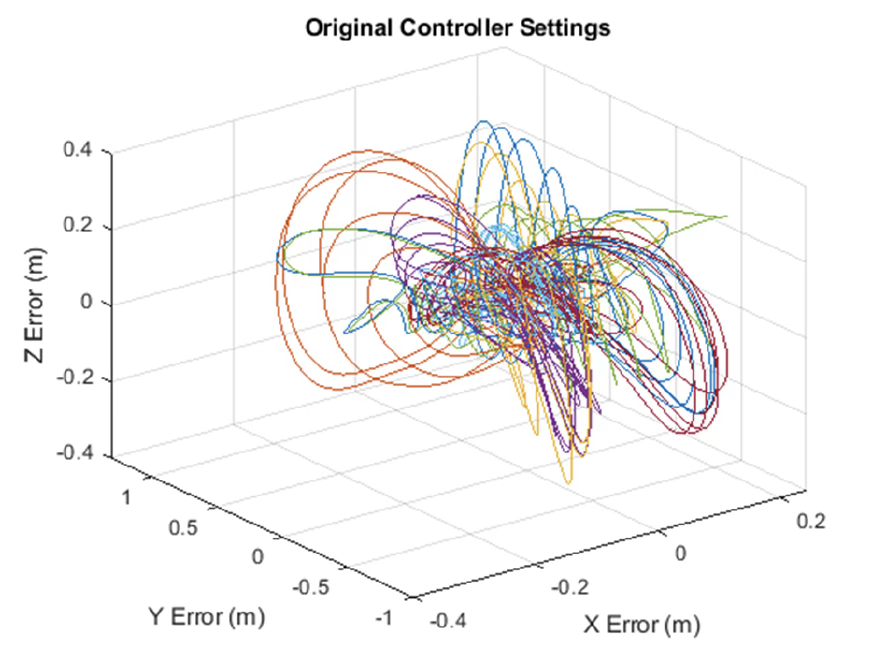
Autonomous vehicle operations in complex industrial environments face the fundamental challenge of adapting to unpredictable disturbances such as wind gusts, water currents, and electromagnetic interference that can compromise mission success and safety. Our learning-based controller optimization framework addresses this challenge by developing neural network-based systems that dynamically tune controller parameters for both aerial (UAV) and underwater (UWV) vehicles in real-time. The core technical innovation combines neural predictors, disturbance observers, and model-based controllers to create an adaptive control system where gains and constraints automatically adjust to environmental conditions while maintaining strict stability and safety requirements. This approach solves the critical problem of maintaining precise control performance in GPS-denied, cluttered environments where traditional fixed-parameter controllers fail due to unpredictable disturbances and complex fluid dynamics.
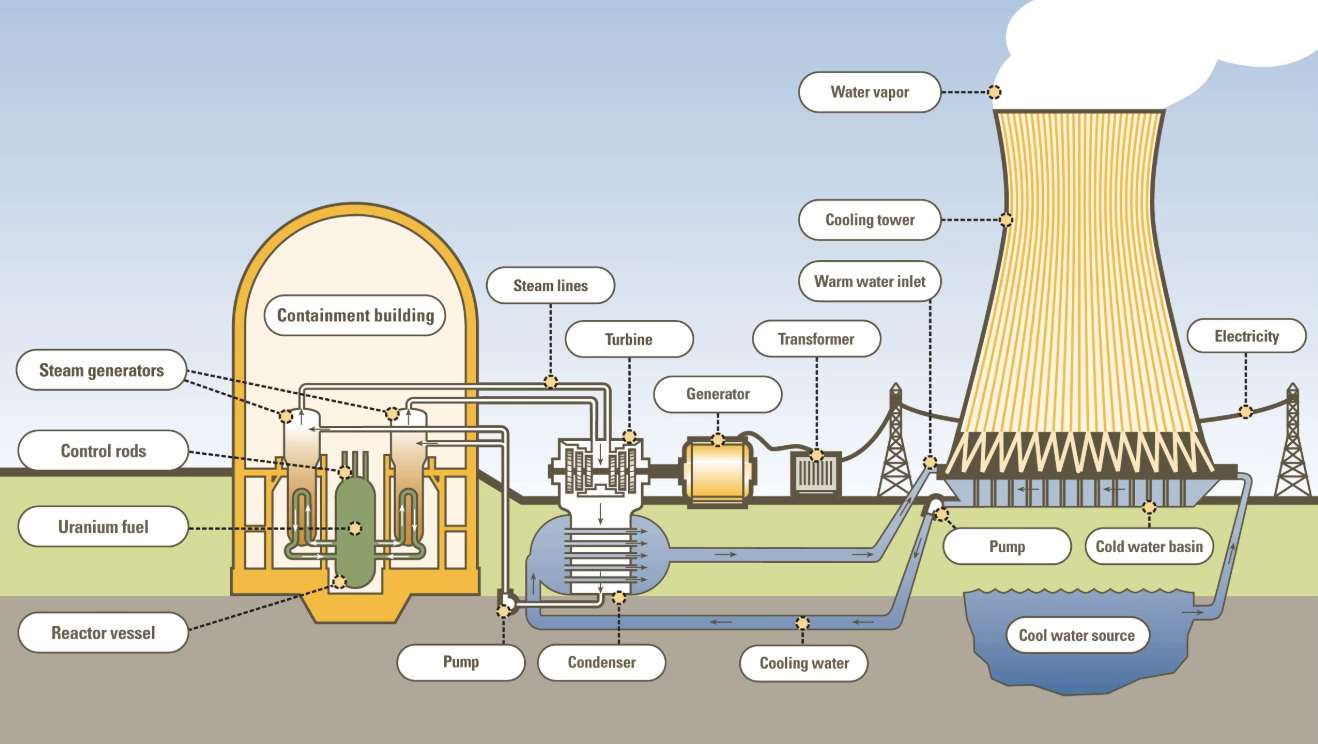
The technology offers immediate applications in nuclear power plant inspection, underwater infrastructure monitoring, and industrial facility assessment where both aerial and underwater vehicles must operate reliably in challenging environments. The system’s validated performance through motion-capture flight tests and underwater trials demonstrates robust, low-latency adaptation that complements existing autopilot systems without requiring major modifications to current platforms. Research impact includes advancing adaptive control theory, establishing new standards for autonomous vehicle reliability in harsh environments, and enabling inspection missions previously considered too risky or technically infeasible. Our team combines expertise in control systems, machine learning, and robotics, seeking partnerships with nuclear facilities, infrastructure inspection companies, and autonomous vehicle manufacturers interested in deploying next-generation adaptive control systems that ensure mission success in complex operational environments.